Kevin Mack: PhD Student, Research Assistant, Electrical Engineering
I’m a graduate student and research assisstant in the CoSiNe Lab at Clarkson University. My focus is on various topics in Machine Learning, Signal Processing, and Communications. I have also worked on engineering education projects, with a focus on creating and using mobile apps as tools for learning and education outreach.
This site is still a work in progress, and is being updated incrimentally to include projects that I have worked on, and works that can be found publicly.
Interests and Current Research
My most recent work is in underwater LiDAR and remote sensing. The project uses a time-of-flight (ToF) camera, which has been modified to perform optical sensing and object detection in the underwater environment. This technology has the potential to be highly useful for situational awareness, due to its inherent high framerate sensing and it’s ability to determine absolute size of the object in question. The general principle behind ToF technology is given by the figure below. 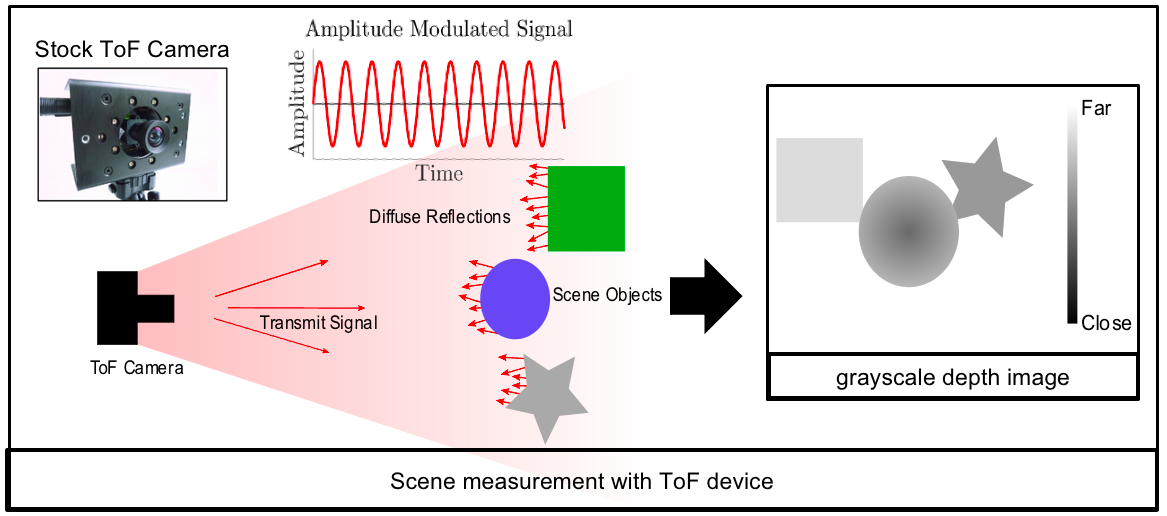
The underwater environment poses a challenge for underwater optical sensing, due to the high amounts of signal scattering and absorption (see figure below). 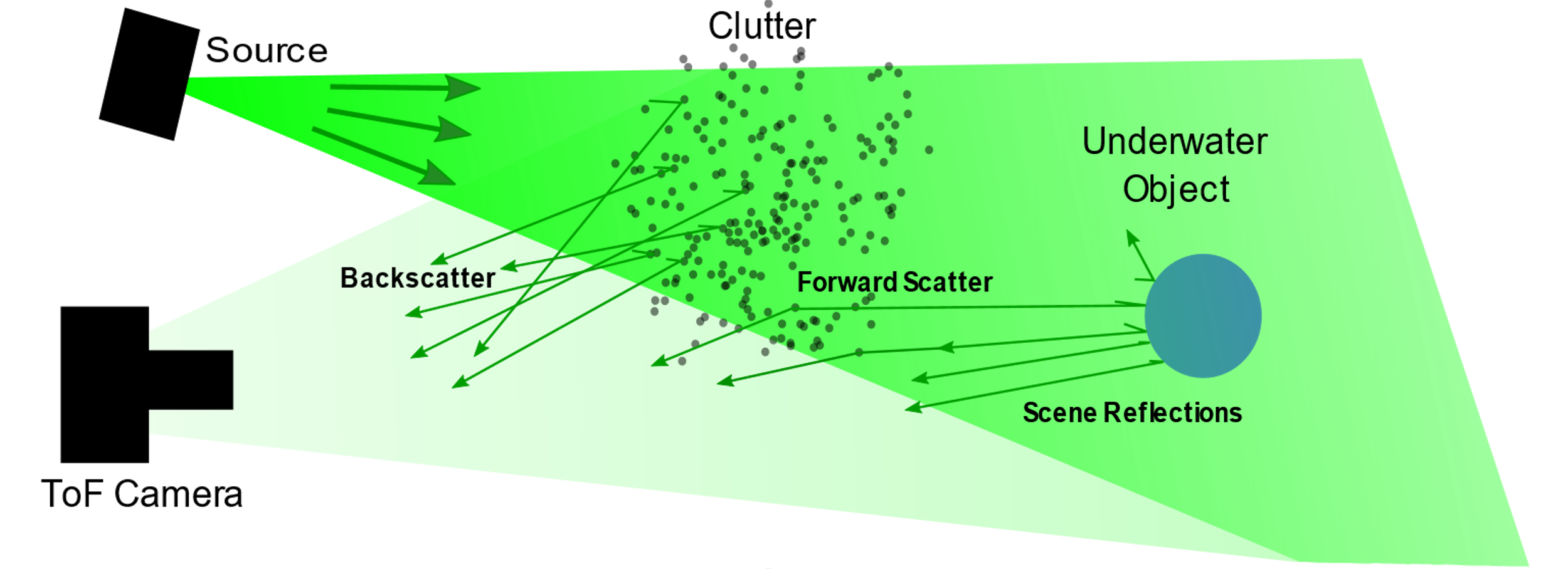
The stock ToF camera needs to be modified to fit the underwater application. This is done by using the camera’s pulsed CW signal to drive a 525nm 1 Watt laser diode. Some of the circuit board revisions, as well as photos of the field testing apparatus that was developed by undergraduate students at Grove City College are given in the figure below. 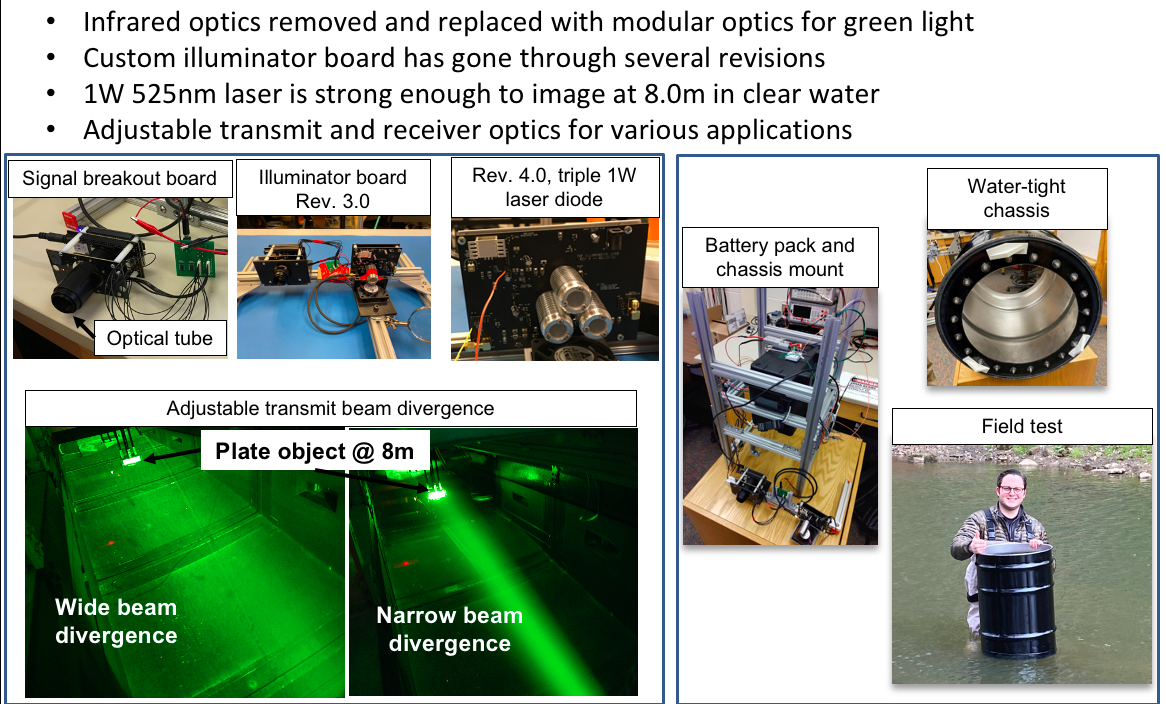
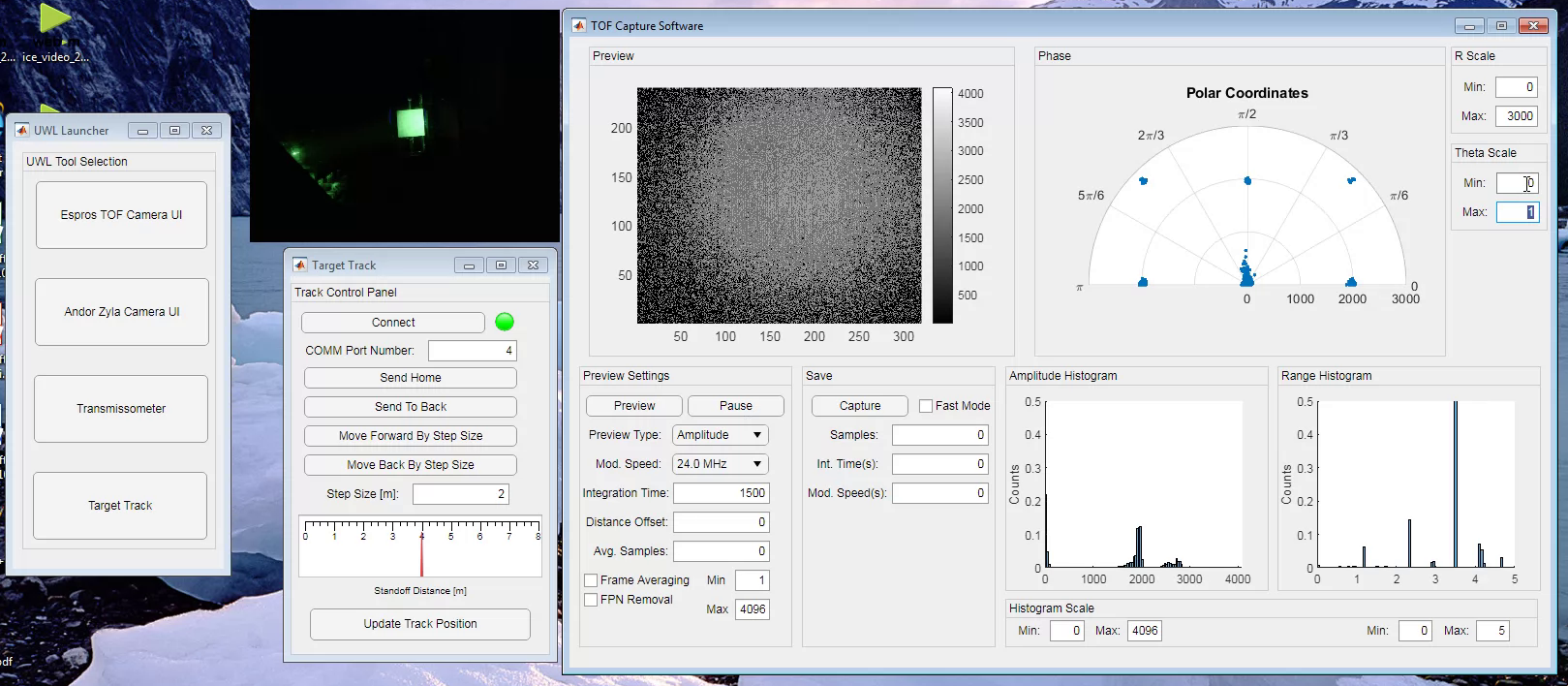
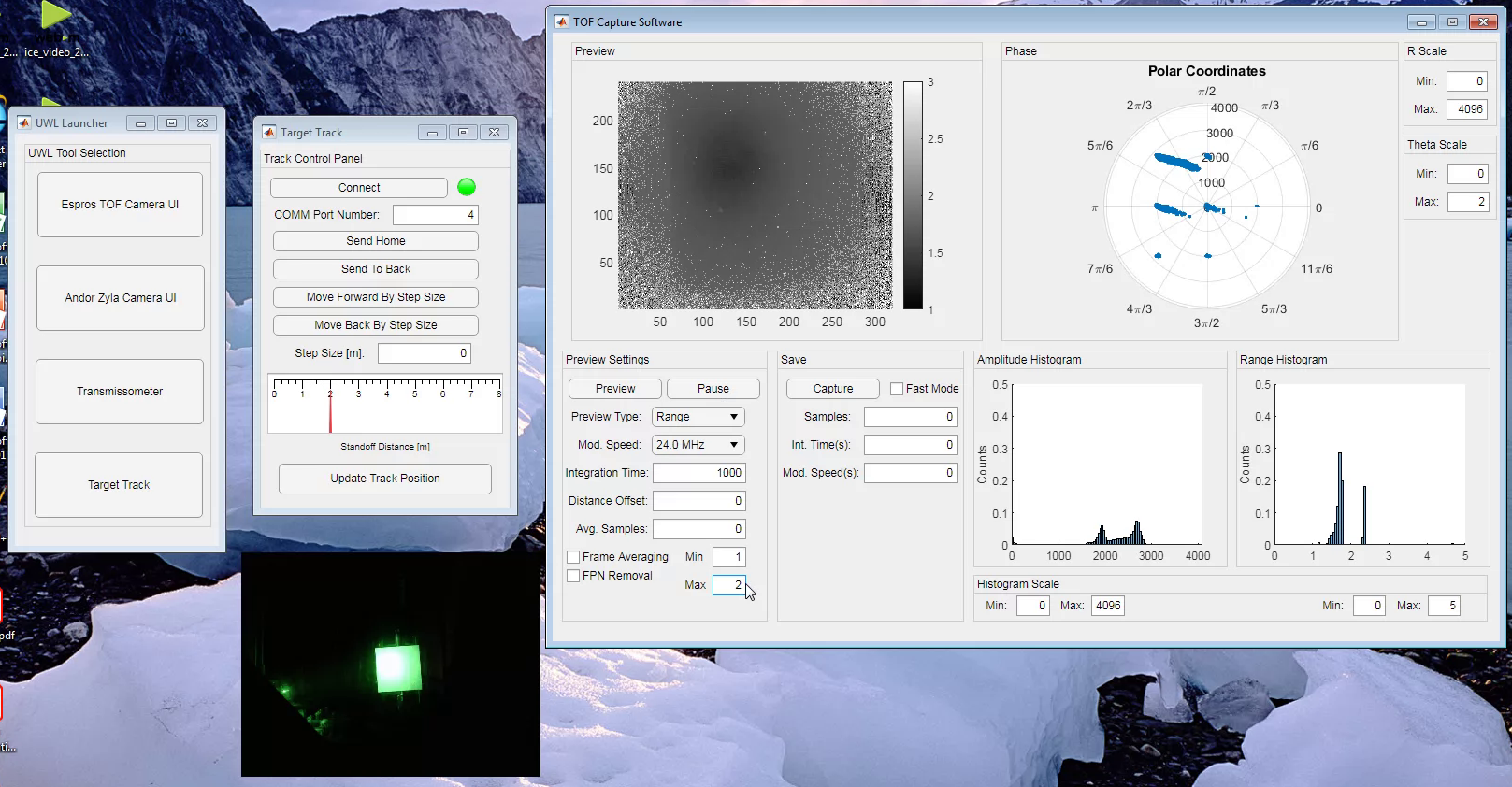
Here is a GUI made with PyQt used for viewing data from a time-of-flight (ToF) camera. The app receives data over tcp connection, and displays in the GUI. This project can be found here. 
The setups for two specific exepriments are given in the figure below, 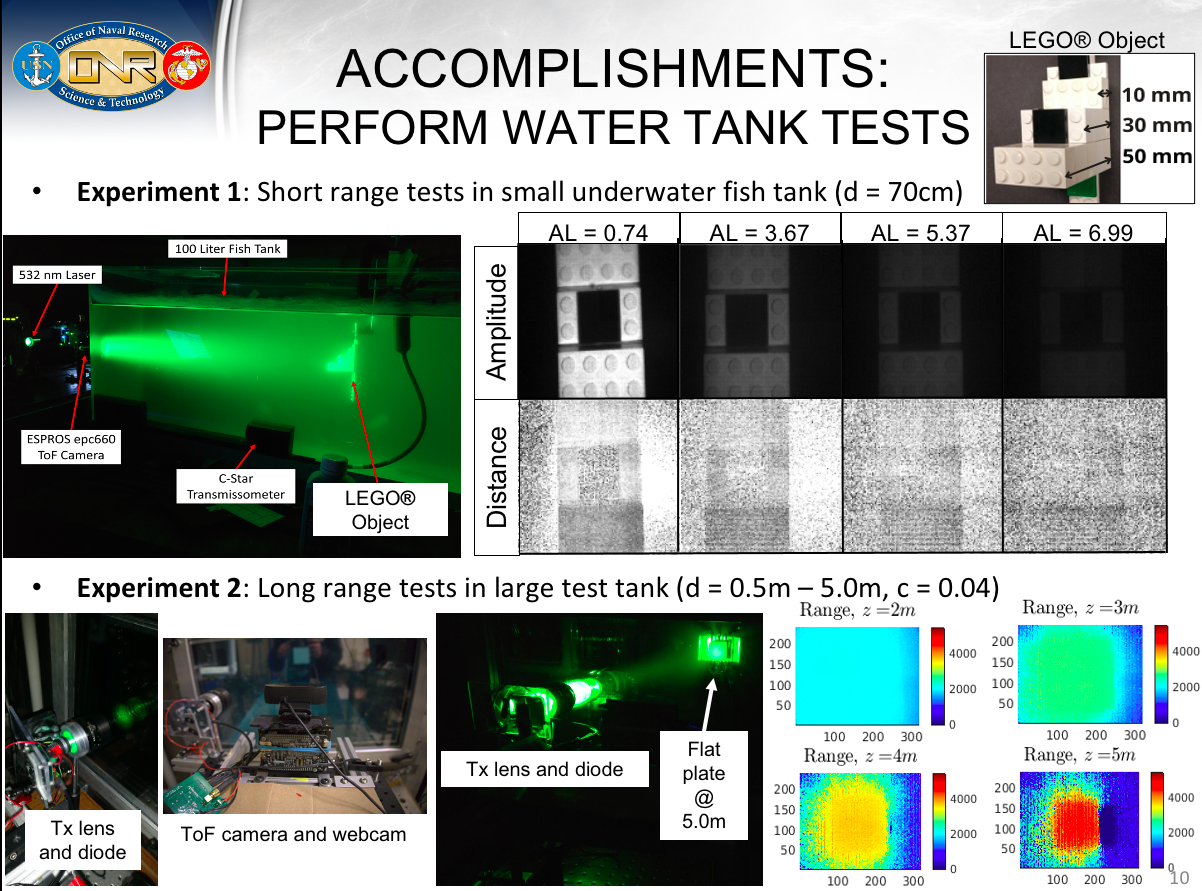
and the results for close range experiments are given in the form of range images. 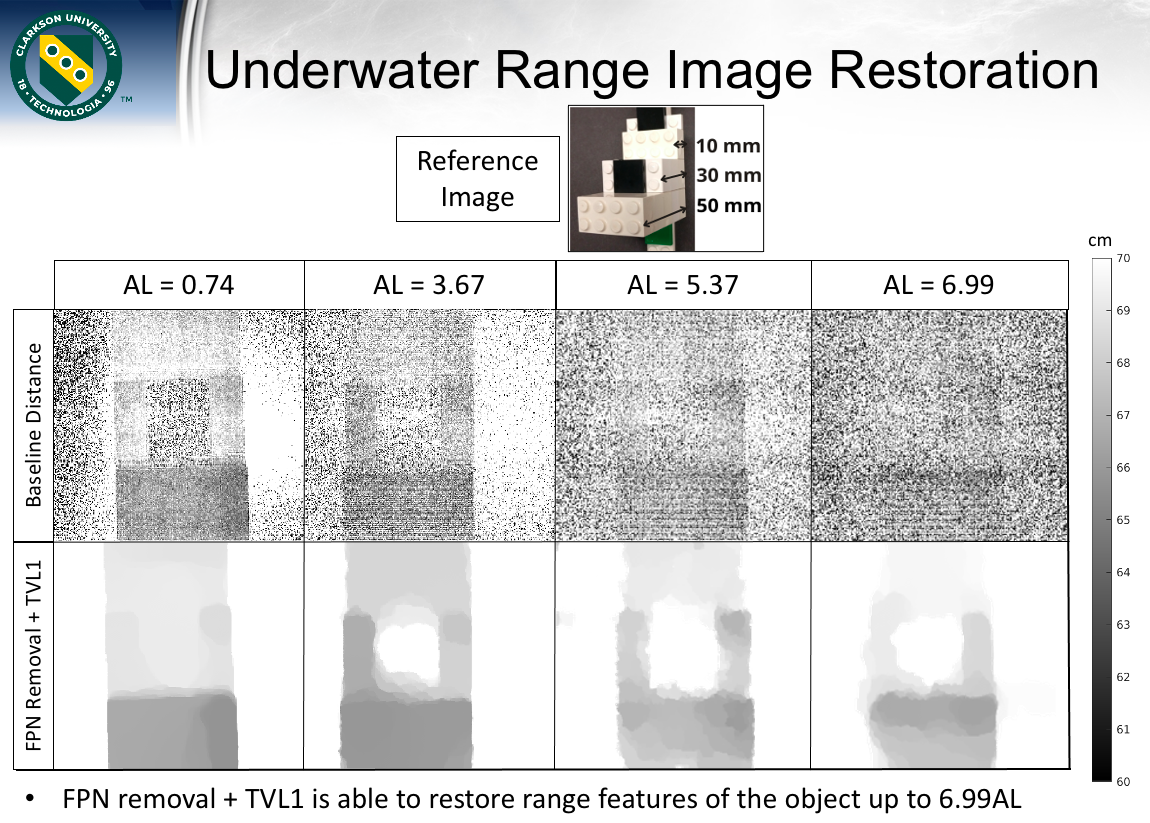
The above results are obtained from treating the data with a digital filter to remove the camera’s inherent noise, then the scatter is treated with a primal dual algorithm that solves the $L_1$ total variation (TV) regularization image reconstruction problem. The details are published here.
Personal and Course Projects
Signal and Image Processing
Real-time VGG-16 based semantic segmentation network for self-driving vehicles (an implementation of the work here.)
Output from a semantic segmentation neural network. The colors represent segments of the image that belong to certain class of objects. The .gif shows the raw input data, the pixel classification, and the overlay for two slightly different settings. The network was trained on the cityscapes dataset, and was an implementation of known neural network structures that work well for this problem. The test data was recorded from my own dashcam. This work served as my project for my Neuromorphic Computing course. 
Image Restoration and Underwater ToF Simulation
In this example, the turbid underwater environment is modeled and used to simulate the impulse response of the imaging channel. The result is that image quality is degraded by forward and backward scattered signal. How to undo the effects of scattering and uncover the true image in such degraded visual environments is an active area of research in image processing. 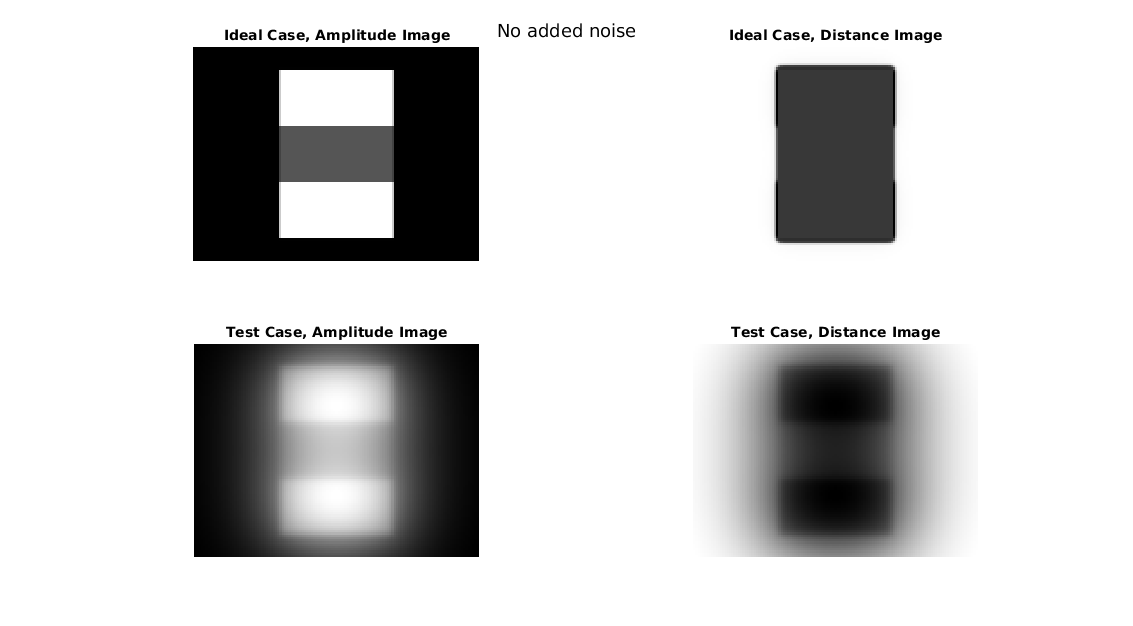
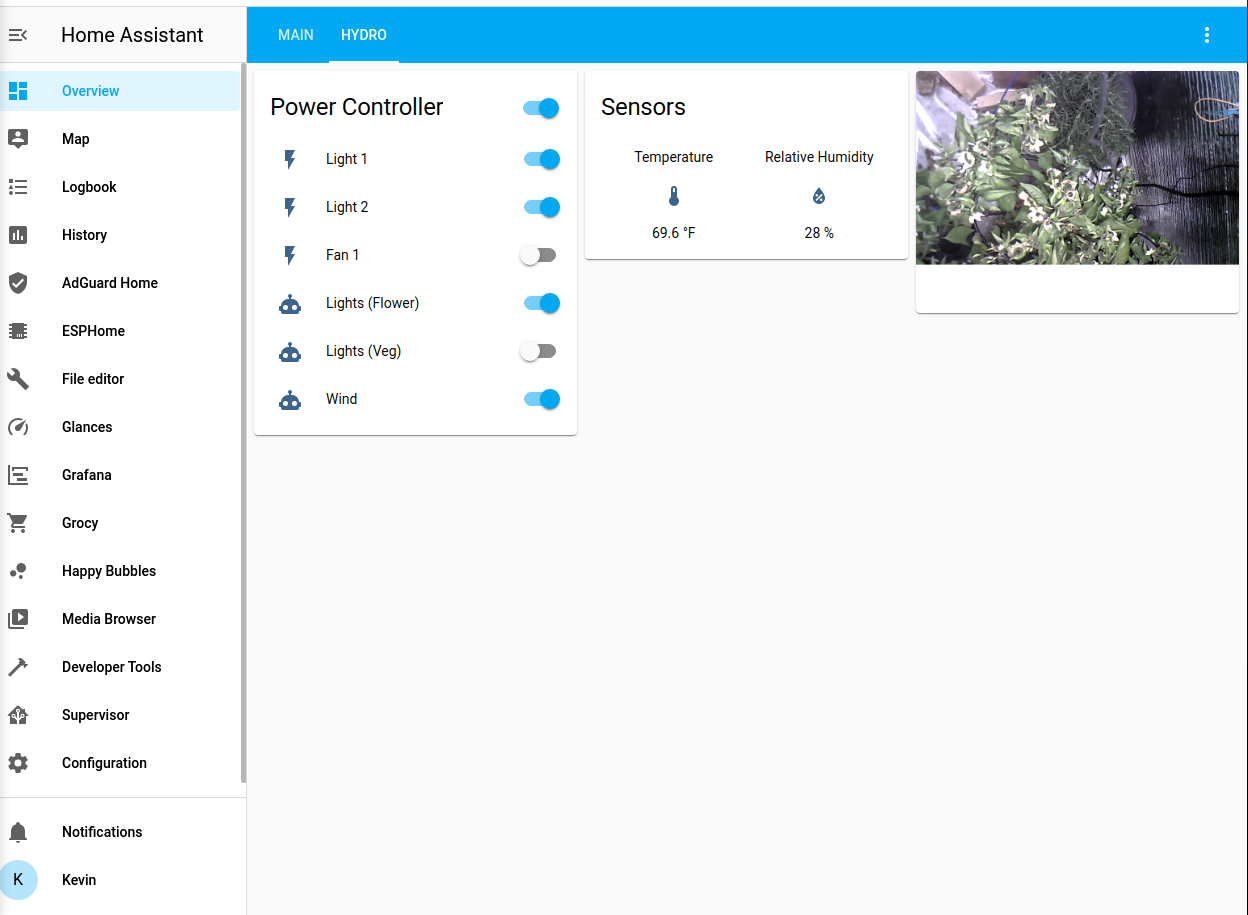
Automation
HomeAssistant Project
Clarkson University Underwater LiDAR Test Tank